Doing a major upgrade on a boat in Indonesia ranks up there on top of the crazy scale. But to be fair, I did try to get it done in Darwin before I left, but supply chains conspired against me.
But let’s start from the beginning.
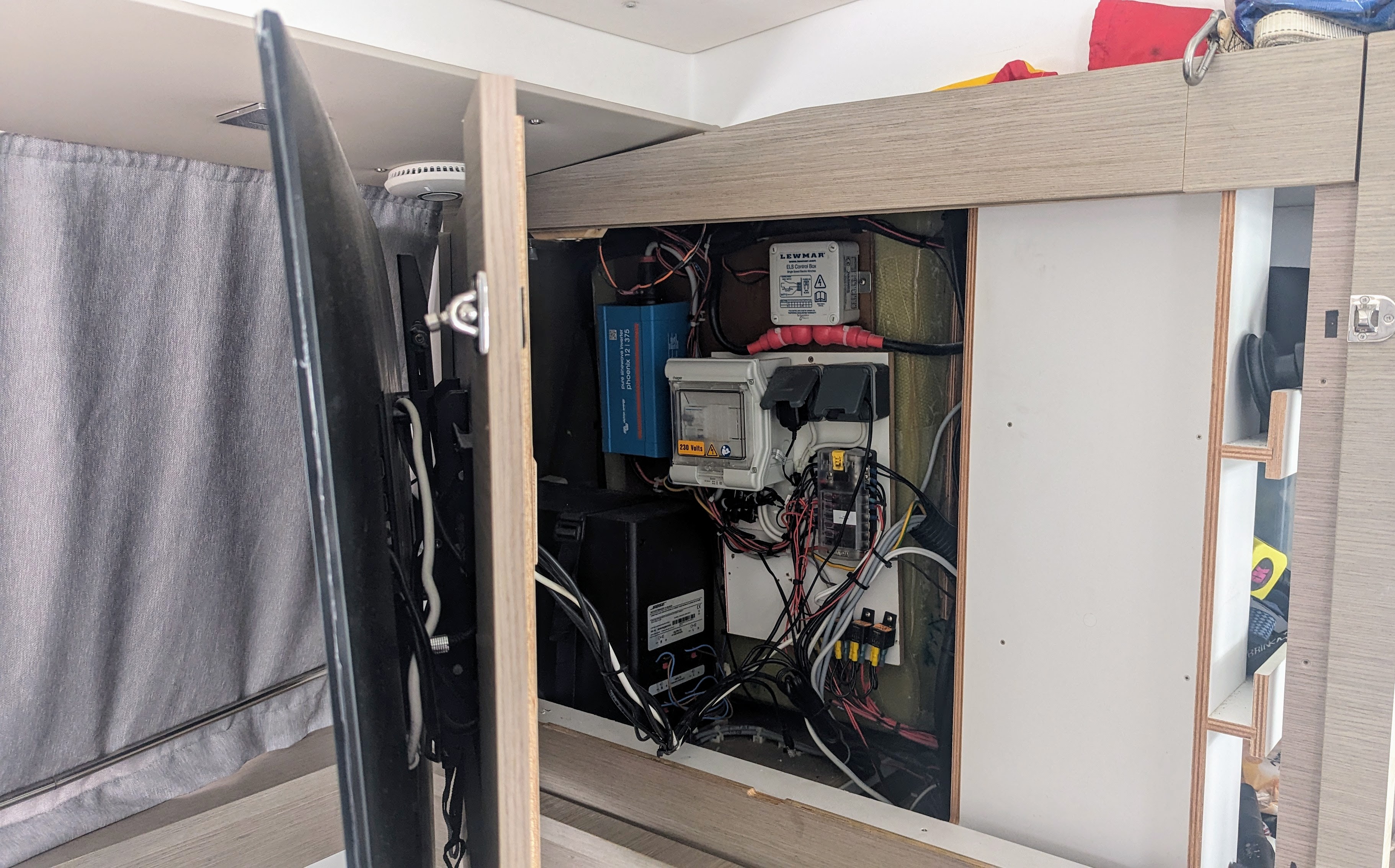
One of the things I’ve been wanting to do for Indonesia is to generate a lot more power from my alternators when the motors are running, something we use a lot in hot and windless Indonesia. More power = more air-conditioning. We are getting soft in our old age.
Having installed a 48V system from Safiery to support our 48V efficient airconditioners from Frigomar, I saw that Safiery had released a Bi-Directional Motor (BMG) with an inverter on the front, that ran off a serpentine belt, similar to an alternator, which could output up to a massive 10kW, according to their literature (https://safiery.com/product/48v-bidirectional-motor-generator-volvo-mount-with-12v-3000w-auxilliary-power-2/). I watched a few youtube videos on successful installations as well as speaking to a few happy customers that had installed one of these.

So I pushed the button on a purchase with the view to getting them installed in Darwin, before I left for Indonesia. Our first attempt at installing them was a failure as the standard mounts didn’t work on my Volvo Pentas. No worries, Safiery had started production on a different set of mounts for Volvo Pentas and they were swapped out for these. Or at least one was, as I needed to wait for the second one to roll off the production line and time was against us. So I sailed out of Darwin with one unit on board and the promise of a second one to be sent to my son, Alex in Perth.
So now I needed to come up with a cunning plan.
Safiery put us onto Marcus, who had just had a Malaysian electrician fit his BMG in Langkawi; and he was highly impressed with them. So I contacted the said Joe and got him to do some design work remotely so we could both understand if we could successfully get this done in remote Indonesia. The more I worked with Joe, the more I was impressed, and now the job is done, I can say he’s one of the best electricians I’ve worked with, and a really nice and honest guy to boot.

We had already planned to put the boat up in Tateli Ivory Marina in Manado, as this had a great airport with direct flights to Singapore, so I arranged for Joe to fly to Manado for the week after I got back from Perth to do the work.
My next task was to source marine grade wire, fuses etc for the job. I crashed and burned trying to find 50mm2 wire in Indonesia, but then I was talking to Craig from SV Cool Bananas who kindly offered to fly back with it as excess baggage from China, where his brother in law could source it.
The rest of the gear I needed I got in Perth and flew back as excess baggage. Whilst in Perth, my mate Allan helped plan the install of the BMG on my Volvo Engines. We found a D2-75 engine on the floor of one of the resellers and went out and worked out how to fit it, by removing a spacer so that the belt would line up. Once again, Allan was a great help.

Don’t you love it when a plan comes together. Joe flew in and we got him a hotel next door. Malaysian Electricians are a lot cheaper than Australian ones, so with the flights and accommodation I was still in front.
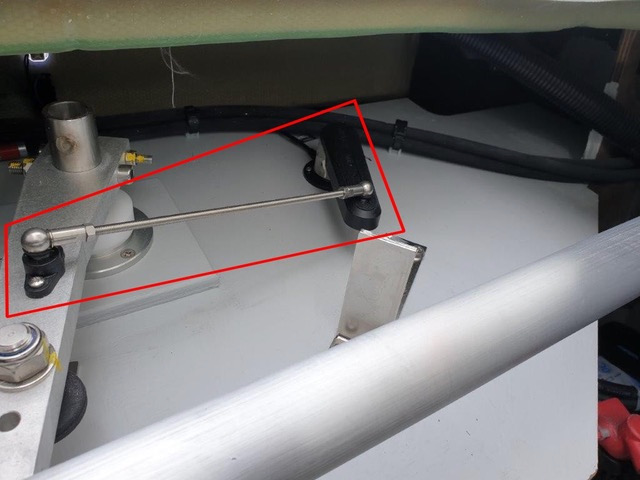
The install went reasonably smoothly. I’d bought two Volvo mounts for a second alternator (my original alternators still charge my 12V Victron LIFEPO4 batteries). We needed to get an extension bar manufactured to lift the BMGs higher so they cleared the diesel intakes on top of the d2-75 engines. This was basically just a bar that is bolted on. The other issue we encountered was the fuses – our Chinese supplier provided us with ANL fuses rather than Mega fuses so we couldn’t use the Victron Distributors I bought in Perth, but luckily I had some other large bus bars on board. Other than that it was just the usual challenges of running large wires through the boat. It was a big job and Joe worked tirelessly to get it done to his high standards.
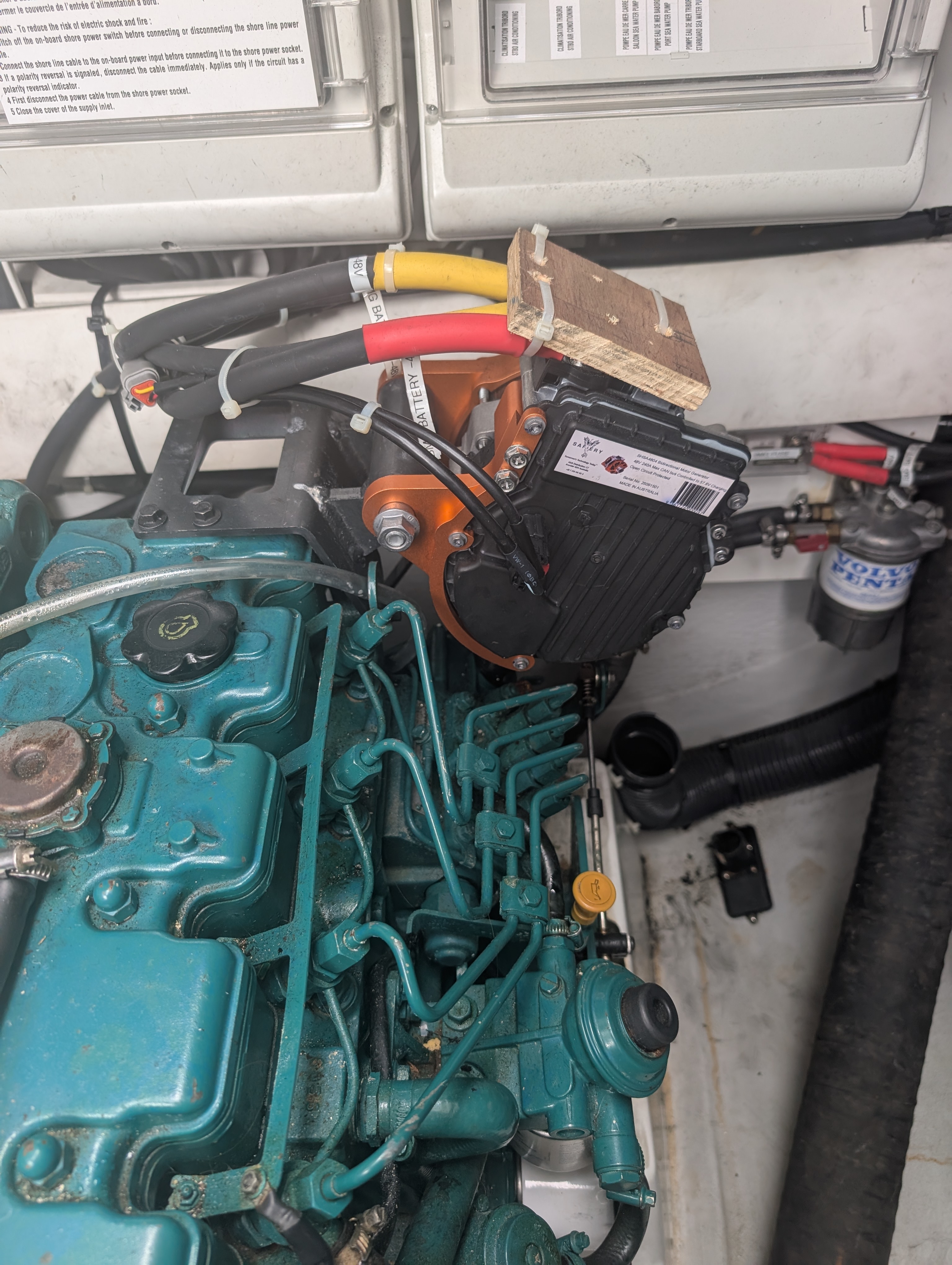
As you can see from the above video, doing these sorts of projects in remote Indonesia presents some challenges, in this case we couldn’t source any terminal covers for the top of the BMG and this things pumps out a lot of 48V current, so we needed to McGiver a cover.
There’s a fair bit of tuning you can do with the charging curve but I’ve settled on 5kw at 1800 RPM for now, as this is more than sufficient for our needs.
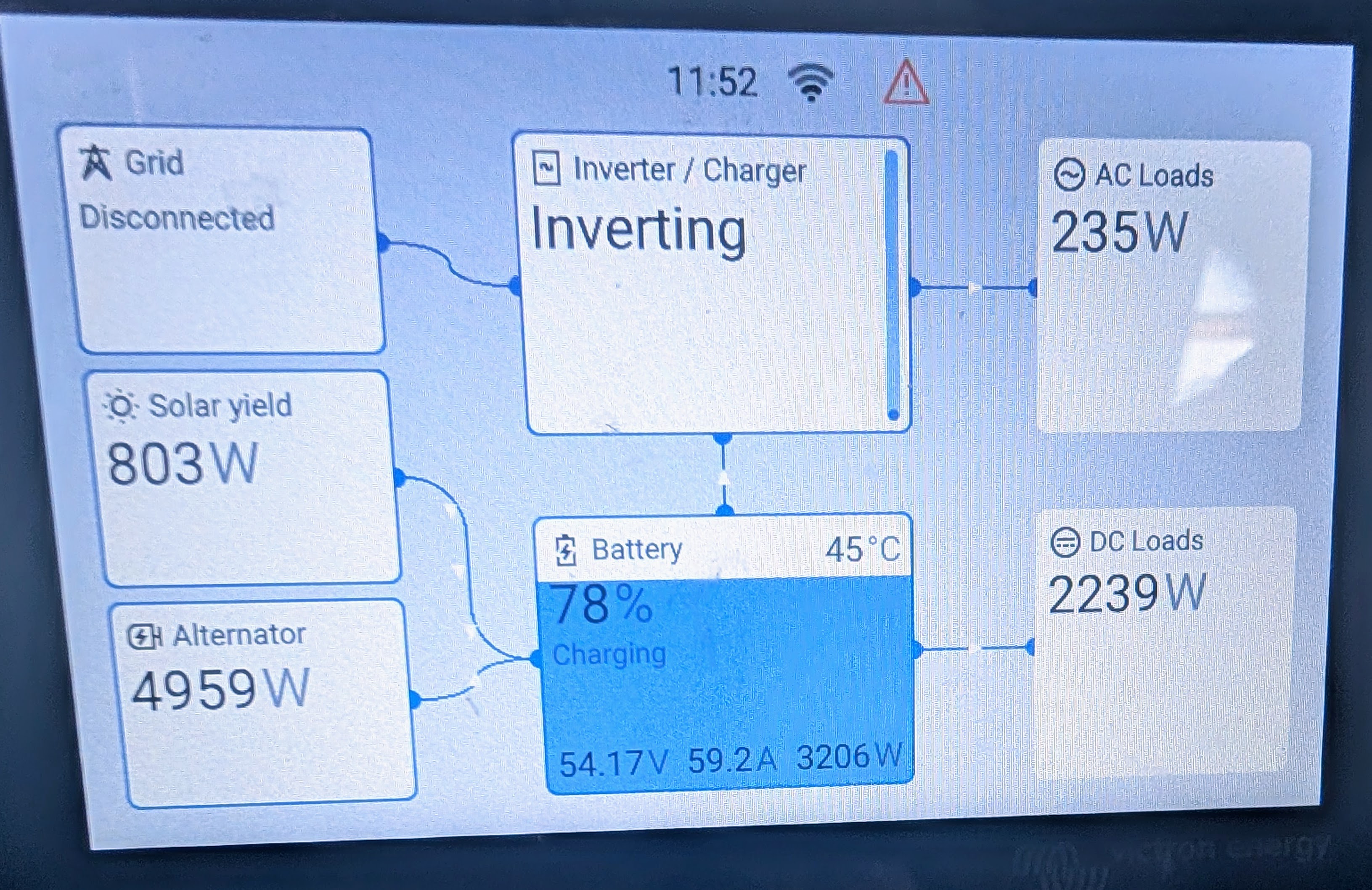
We have been running about 5 weeks now without any problems, enjoying all that power.

Finally I need to say something about Safiery, given the amount of negative chatter on the internet. Whilst I cannot comment about other people’s experiences, my dealings with Safiery have been good. I find them reasonably responsive and good to deal with (I had a battery replaced under warranty). I know from personal experience the challenges of running a small Australian company and enjoy giving my business to fellow Aussies. I’ve never come across any tech like the BMG units and its great to see this level of innovation coming out of Australia.
Below is one of Safiery’s marketing videos from another boat.